
Space History for September 3
If you are not already a subscriber, you are welcome to enter your email address here to sign up to receive the Space History newsletter on a daily basis. Under no circumstances will we release your legitimate email address entered here to outside persons or organizations, and it will only be used for mailing the specific information you have requested.
| Enter your email address here: |
Unsubscribe instructions are included in every newsletter issue in case you decide you no longer wish to receive it.
Note: We record the IP address from which subscriptions are entered to help prevent SPAM abuses.
Race To Space
Someone will win the prize...
... but at what cost?
Visit RaceToSpaceProject.com
to find out more!
1882
K. De Ball discovered asteroid #230 Athamantis.
1885
J. Palisa discovered asteroid #250 Bettina.
1902
M. Wolf discovered asteroids #490 Veritas, #491 Carina and #492 Gismonda.
1913
G. Neujmin discovered asteroid #762 Pulcova.
1918
J. Palisa discovered asteroid #902 Probitas.
1944
Born, Sherwood Clark "Woody" Spring (at Hartford, Connecticut, USA), Colonel US Army, NASA astronaut (STS 61-B; over 6d 21h in spaceflight)

Astronaut Sherwood "Woody" Spring, NASA photo S81-25294 (8 January 1981)
Source: NASA Image and Video Library
https://en.wikipedia.org/wiki/Sherwood_C._Spring
1950
E. L. Johnson discovered asteroid #1607 Mavis.
1964 17:54:00 GMT
NASA and the USAF launched X-15A HT/BLN Test mission # 116 in which Milt Thompson reached a maximum speed of 3615 mph (5818 kph, Mach 5.35), and achieved a maximum altitude of 78,600 ft (23.957 km, 14.886 mi).
https://en.wikipedia.org/wiki/List_of_X-15_flights
1975
A. R. Klemola discovered asteroid #2131 Mayall.
1976 22:58:20 GMT
NASA's Viking 2 lander touched down on Mars.
The Viking project consisted of launches of two separate spacecraft to Mars, Viking 1, launched on 20 August 1975, and Viking 2, launched on 9 September 1975. Each spacecraft consisted of an orbiter and a lander. After orbiting Mars and returning images used for landing site selection, the orbiter and lander detached and the lander entered the Martian atmosphere and soft-landed at the selected site. The orbiters continued imaging and other scientific operations from orbit while the landers deployed instruments on the surface. The fully fueled orbiter-lander pair had a mass of 3530 kg. After separation and landing, the lander had a mass of about 600 kg and the orbiter 900 kg. The lander was encased in a bioshield at launch to prevent contamination by terrestrial organisms.
Following launch and a 333 day cruise to Mars, the Viking 2 Orbiter began returning global images of Mars prior to orbit insertion. The orbiter was inserted into a 1500 x 33,000 km, 24.6 hr Mars orbit on 7 August 1976 and trimmed to a 27.3 hr site certification orbit with a periapsis of 1499 km and an inclination of 55.2 degrees on 9 August. Imaging of candidate sites was begun and the landing site was selected based on these pictures and the images returned by the Viking 1 Orbiter. The lander and its aeroshell separated from the orbiter on 3 September 19:39:59 UT. At the time of separation, the lander was orbiting at about 4 km/s. After separation rockets fired to begin lander deorbit. After a few hours, at about 300 km altitude, the lander was reoriented for entry. The aeroshell with its ablatable heat shield slowed the craft as it plunged through the atmosphere. During this time, entry science experiments were performed. At 6 km altitude at about 250 m/s the 16 m diameter lander parachutes were deployed. Seven seconds later the aeroshell was jettisoned, and 8 seconds after that the three lander legs were extended. In 45 seconds the parachute had slowed the lander to 60 m/s. At 1.5 km altitude, retro-rockets were ignited and fired until landing 40 seconds later at about 2.4 m/s. The landing rockets used an 18 nozzle design to spread the hydrogen and nitrogen exhaust over a wide area. It was determined that this would limit surface heating to no more than 1 degree C and that no more than 1 mm of the surface material would be stripped away.
The Viking 2 Lander touched down about 200 km west of the crater Mie in Utopia Planitia at 48.269 deg N latitude and 225.990 deg W longitude at a reference altitude of 4.23 km relative to a reference ellipsoid with an equatorial radius of 3397.2 km and a flatness of 0.0105 (48.039 deg N, 226.032 deg W planetographic) at 3 September 1976 22:58:20 UT (9:49:05 AM local Mars time). Approximately 22 kg of propellants were left at landing. Due to radar misidentification of a rock or highly reflective surface, the thrusters fired an extra time 0.4 seconds before landing, cracking the surface and raising dust. The lander settled down with one leg on a rock, tilted at 8.2 degrees. The cameras began taking images immediately after landing. The Viking 2 Lander operated on the surface for 1281 Mars days and was turned off on 11 April 1980 when its batteries failed.
The Viking 2 Orbiter's operating plan called for the structure connecting the orbiter and lander (the bioshield) to be ejected after separation, but because of problems with the separation the bioshield remained attached to the orbiter. The orbit inclination was raised to 75 degrees on 30 September 1976. The orbiter primary mission ended at the beginning of solar conjunction on 8 November 1976. The extended mission commenced on 14 December 1976 after solar conjunction. On 20 December 1976 the periapsis was lowered to 778 km and the orbit inclination raised to 80 degrees. Operations included close approaches to Deimos in October 1977. The periapsis was lowered to 300 km and the period changed to 24 hours on 23 October 1977. The orbiter developed a leak in its propulsion system that vented its attitude control gas. It was placed in a 302 x 33176 km orbit and turned off on 25 July 1978 after returning almost 16,000 images in 706 orbits around Mars.
The primary objectives of the Viking orbiters were to transport the landers to Mars, perform reconnaissance to locate and certify landing sites, act as a communications relays for the landers, and to perform their own scientific investigations. The orbiter, based on the earlier Mariner 9 spacecraft, was an octagon approximately 2.5 m across. The total launch mass was 2328 kg, of which 1445 kg were propellant and attitude control gas. The eight faces of the ring-like structure were 0.4572 m high and were alternately 1.397 and 0.508 m wide. The overall height was 3.29 m from the lander attachment points on the bottom to the launch vehicle attachment points on top. There were 16 modular compartments, 3 on each of the 4 long faces and one on each short face. Four solar panel wings extended from the axis of the orbiter, the distance from tip to tip of two oppositely extended solar panels was 9.75 m. Power was provided by eight 1.57 x 1.23 m solar panels, two on each wing, were made up of a total of 34,800 solar cells that produced 620 W of power at Mars. Power was also stored in 2 nickel-cadmium 30-amp-hr batteries.
The orbiter's main propulsion unit was mounted above the orbiter bus. Propulsion was furnished by a bipropellant (monomethyl hydrazine and nitrogen tetroxide) liquid-fueled rocket engine which could be gimballed up to 9 degrees. The engine was capable of 1323 N thrust, translating to a delta-V of 1480 m/s. Attitude control was achieved by 12 small compressed-nitrogen jets. An acquisition Sun sensor, a cruise Sun sensor, a Canopus star tracker and an inertial reference unit consisting of 6 gyroscopes allowed three-axis stabilization. Two accelerometers were also on board. Communications were accomplished through a 20-W S-band (2.3 GHz) transmitter and 2 20-W TWTA's. An X-band (8.4 GHz) downlink was also added specifically for radio science and to conduct communications experiments. Uplink was via S-band (2.1 GHz). A 2-axis steerable high-gain parabolic dish antenna with a diameter of approximately 1.5 m was attached at one edge of the orbiter base, and a fixed low-gain antenna extended from the top of the bus. Two tape recorders were each capable of storing 1280 Mbits. A 381 MHz relay radio was also available. Temperature control was achieved by multilayer insulation, thermally activated louvers, and electrical heaters.
Scientific instruments for conducting imaging, atmospheric water vapor, and infrared thermal mapping were enclosed in a temperature controlled, pointable scan platform extending from the base of the orbiter. The scientific instrumentation had a total mass of approximately 72 kg. Radio science investigations were also done using the spacecraft transmitter. Command processing was done by two identical and independent data processors, each with a 4096-word memory for storing uplink command sequences and acquired data.
The lander consisted of a 6-sided aluminum base with alternate 1.09 m and 0.56 m long sides, supported on three extended legs attached to the shorter sides. The leg footpads formed the vertices of an equilateral triangle with 2.21 m sides when viewed from above, with the long sides of the base forming a straight line with the two adjoining footpads. Instrumentation was attached to the top of the base, elevated above the surface by the extended legs. Power was provided by two radioisotope thermal generator (RTG) units containing plutonium 238 affixed to opposite sides of the lander base and covered by wind screens. Each generator was 28 cm tall, 58 cm in diameter, had a mass of 13.6 kg and provided 30 W continuous power at 4.4 volts. Four wet-cell sealed nickel-cadmium 8-amp-hour, 28 volt rechargeable batteries were also onboard to handle peak power loads.
The lander's propulsion was provided for deorbit by a monopropellant hydrazine (N2H4) rocket with 12 nozzles arranged in four clusters of three that provided 32 N thrust, giving a delta-V of 180 m/s. These nozzles also acted as the control thrusters for translation and rotation of the lander. Terminal descent and landing was achieved by three (one affixed on each long side of the base, separated by 120 degress) monopropellant hydrazine engines. The engines had 18 nozzles to disperse the exhaust and minimize effects on the ground, were throttleable from 276 N to 2667 N. The hydrazine was purified to prevent contamination of the Martian surface. The lander carried 85 kg of propellant at launch, contained in two spherical titanium tanks mounted on opposite sides of the lander beneath the RTG windscreens, for a total launch mass of 657 kg. Control was achieved through the use of an inertial reference unit, four gyros, an aerodecelerator, a radar altimeter, a terminal descent and landing radar, and the control thrusters.
Lander communications were accomplished through a 20 W S-band transmitter and two 20 W TWTA's. A 2-axis steerable high-gain parabolic antenna was mounted on a boom near one edge of the lander base. An omnidirectional low-gain S-band antenna also extended from the base. Both these antennae allowed for communication directly with the Earth. A UHF (381 MHz) antenna provided a one-way relay to the orbiter using a 30 W relay radio. Data storage was on a 40 Mbit tape recorder, and the lander computer had a 6000 word memory for command instructions.
The lander carried instruments to achieve the primary scientific objectives of its mission: to study the biology, chemical composition (organic and inorganic), meteorology, seismology, magnetic properties, appearance, and physical properties of the Martian surface and atmosphere. Two 360-degree cylindrical scan cameras were mounted near one long side of the base. From the center of this side extended the sampler arm, with a collector head, temperature sensor, and magnet on the end. A meteorology boom, holding temperature, wind direction, and wind velocity sensors extended out and up from the top of one of the lander legs. A seismometer, magnet and camera test targets, and magnifying mirror are mounted opposite the cameras, near the high-gain antenna. An interior environmentally controlled compartment held the biology experiment and the gas chromatograph mass spectrometer. The X-ray flourescence spectrometer was also mounted within the structure. A pressure sensor was attached under the lander body. The scientific payload had a total mass of approximately 91 kg.
See also the Viking 2 Lander page.
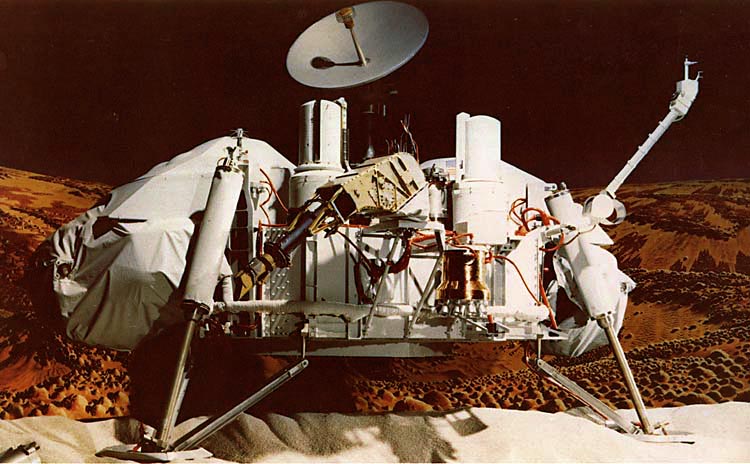
Viking Mars lander model, NASA photo
Source: NSSDCA Master Catalog
https://nssdc.gsfc.nasa.gov/nmc/spacecraft/display.action?id=1975-083C
https://nssdc.gsfc.nasa.gov/nmc/spacecraft/display.action?id=1975-083A
1978 11:40:00 GMT
USSR Soyuz 29 landed with the crew of Bykovsky and Jaehn aboard, returning from the Salyut 6 space station.
https://nssdc.gsfc.nasa.gov/nmc/spacecraft/display.action?id=1978-061A
1980
Purple Mountain Observatory discovered asteroid #3560.
1981
N. Chernykh discovered asteroid #3504; N. G. Thomas discovered asteroid #2527 Gregory.
1982 05:00:00 GMT
Japan launched Kiku 4, Engineering Test Satellite III (ETS-III), from the Osaki launch site, Tanegashima, to verify 3-axis attitude control, solar array paddle deployment, and active thermal control in a functional test of mission equipment in space.
https://nssdc.gsfc.nasa.gov/nmc/spacecraft/display.action?id=1982-087A
1985 06:15:43 PDT (GMT -7:00:00)
NASA's STS 51-I (Discovery 6, 20th Space Shuttle mission) ended after carrying ASC-1, AUSSAT-1, and SYNCOM IV-4 to orbit, and LEASAT-3 was repaired in orbit.
STS 51-I was scrubbed on 24 August 1985 at T-5 minutes because of thunderstorms in the vicinity. The flight was again scrubbed at T-9 minutes on 25 August 1985 when the orbiter's number five on-board general purpose computer failed. The launch on 27 August at 6:58:01 AM EDT was delayed three minutes, one second due to combination of weather and an unauthorized ship entering the restricted solid rocket booster recovery area.
Three communications satellites were deployed during STS 51-I: ASC-1, for the American Satellite Company; AUSSAT-1, an Australian Communications Satellite; and SYNCOM IV-4, the Synchronous Communications Satellite. ASC-1 and AUSSAT-1 were both attached to Payload Assist Module-D (PAM-D) motors. SYNCOM IV-4 (also known as LEASAT-4) failed to function after reaching the correct geosynchronous orbit. Fisher and van Hoften performed two extravehicular activities (EVAs) totaling 11 hours, 51 minutes. Part of the time (on 31 August and 1 September) was spent retrieving, repairing and redeploying LEASAT-3, deployed on Mission 51-D. The Middeck Payload on the mission was the Physical Vapor Transport Organic Solid Experiment (PVTOS).
STS 51-I ended when Discovery landed 3 September 1985 at 6:15:43 AM PDT on revolution 112 on Runway 23, Edwards Air Force Base, California. Rollout distance: 6,100 feet. Rollout time: 47 seconds. Launch weight: 262,309 pounds. Landing weight: 196,674 pounds. Orbit altitude: 242 nautical miles. Orbit inclination: 28.45 degrees. Mission duration: seven days, two hours, 17 minutes, 42 seconds. Miles traveled: 2.9 million. The mission was shortened one day when the AUSSAT sunshield hung up on the remote manipulator system camera and AUSSAT had to be deployed before it was scheduled. The orbiter was returned to the Kennedy Space Center on 8 September 1985.
The flight crew for STS 51-I was: Joseph H. Engle, Commander; Richard O. Covey, Pilot; James D. A. van Hoften, Mission Specialist 1; John M. Lounge, Mission Specialist 2; William F. Fisher, Mission Specialist 3.
https://www.nasa.gov/mission_pages/shuttle/shuttlemissions/archives/sts-51I.html
1990 00:53:00 GMT
China launched the Fengyun 1B (FY-1B) experimental weather satellite from Taiyuan on a Chang Zheng 4, which operated for over a year, and released the QQW 1 and 2 atmospheric balloons.
https://nssdc.gsfc.nasa.gov/nmc/spacecraft/display.action?id=1990-081A
1992
During the 3h 56m Mir EO-12-1 EVA, Mir cosmonauts Solovyov and Avdeyev began installation of the VDU thruster pod on the Sofora tower.
http://www.spacefacts.de/mir/english/mir-12.htm
1995 09:00:23 GMT
Russia launched Soyuz TM-22 from Baikonur to the Mir space station carrying the Mir Expedition EO-20 crew.
Russia launched Soyuz TM-22 on 3 September 1995 from Baikonur to the Mir space station carrying the Mir Expedition EO-20 crew. The crew commander was Yuriy Pavlovich Gidzenko of the Russian Air Force. Flight engineer was Sergey Vasilyevich Avdeev of RKK Energiya, and cosmonaut-researcher was Thomas Reiter of the European Space Agency. Soyuz TM-22 docked with Mir's front (-X) port at 10:29:54 GMT on September 5 and the hatch was opened at 11:01:23.
Soyuz TM-22 landed on 29 February 1996.
https://nssdc.gsfc.nasa.gov/nmc/spacecraft/display.action?id=1995-047A
2004 16:43:00 GMT
During the 5h 20m ISS EO-9-4 EVA, Fincke and Padalka removed and jettisoned the Zarya PIG container with the RRZh1 flow regulator valve panel, and installed 3 antennas on Zvezda for European ATV logistics spacecraft rendezvous and docking operations.
https://en.wikipedia.org/wiki/Expedition_9#Spacewalks
2006 05:42:22 GMT
ESA's SMART1 Lunar probe impacted the Moon's surface, ending its scientifc and technology development missions.
ESA's SMART-1 (Small Missions for Advanced Research in Technology 1), launched 27 September 2003, was a Lunar orbiter designed to test spacecraft technologies for future missions. It entered an initial Lunar orbit on 13 November 2004. The primary technology tested was a solar-powered ion drive. It also carried an experimental deep-space telecommunications system and an instrument payload to monitor the ion drive and study the Moon. The primary scientific objectives of the mission were to return data on the geology, morphology, topography, mineralogy, geochemistry, and exospheric environment of the Moon, in order to answer questions about planetary formation accretional processes, origin of the Earth-Moon system, the Lunar near/far side dichotomy, long-term volcanic and tectonic activity, thermal and dynamical processes involved in Lunar evolution, and water ice and external processes on the surface.
The primary objective of SMART-1 was to test the solar-powered ion thruster (Solar Electric Primary Propulsion, SEPP). It also tested miniaturized scientific instruments for use on future ESA missions. A secondary objective was to learn more information about the Moon, such as how it was created. SMART-1 was to map the Lunar surface using X-ray and infrared imaging, taking images from several different angles so the Moon's surface could be mapped in three dimensions. It was also to determine the Moon's chemical composition using X-ray spectroscopy. A specific goal was to use infrared light to search for frozen water at the Moon's south pole, where some areas of the surface are never exposed to direct sunlight, and to map the Moon's Peak of Eternal Light (PEL), an eerie mountaintop permanently bathed in sunlight and surrounded by craters shaded in eternal darkness.
SMART-1 was a box-shaped spacecraft roughly a meter on a side, with two large solar panel wings spanning 14 meters extending from opposite sides. The launch mass, including fuel, was 366.5 kg (815 pounds), the mass at the time it reached the Moon was expected to be about 305 kg. Its solar-electric propulsion system (a Stationary Plasma Hall-effect thruster, PPS-1350) used xenon gas as a propellant, ionizing the xenon and accelerating and discharging the plasma from the spacecraft at high speed. Electrons were also released into the flow to maintain a neutral charge on the spacecraft. A thrust of 70 milliNewtons and a specific impulse of 16.1 kN-s/kg (1640 seconds), more than three times the maximum for chemical rockets, was produced. 82 kg of supercritical xenon propellant (60 liters, about 16 gallons) was carried aboard SMART-1 in a tank mounted in the center of the structure above the thruster. The spacecraft was three-axis stabilized using four skewed reaction wheels and eight 1-N hydrazine thrusters mounted on the corners of the spacecraft bus. Attitude knowledge was provided by a star tracker, Sun sensor, and angular rate sensors.
1190 W was available for powering the thruster, giving a nominal thrust of 68 mN, and an acceleration of 0.2 mm/s/s (0.7 m/s per hour, 2/10,000 G). Consequently, orbital maneuvers are not carried out in short bursts, as with chemical rockets, but very gradually, with engine on-time typically once every orbit for about one third to one half of the orbit (when spiralling out, at the perigee side). Over an operating lifetime of 5,000 hours, a delta-v of 4 km/s results, corresponding to a total impulse of 1.5 MN-s.
1850 W of power was produced from an array of gallium-indium-phosphide gallium arsenide germanium (GaInP/GaAs/Ge) solar cells covering an active surface on the wings of about 10 square meters. Solar array power was regulated to 50 V in the power control and distribution unit, distributed via solid-state power controllers, and stored in five 130 W/hr lithium ion battery cells. Roughly 75% of the power was used to run the propulsion system during flight. Thermal control was achieved through the use of radiators, heat pipes, multilayer insulation blankets, thermistor controlled heaters, and high emissivity optical properties. Communication took place via a medium gain and two low gain S-band antennas, as well as the antenna for the experimental Ka/X system. The medium gain antenna provided a telemetry rate of 65 kb/s. The two low gain antennas provided omin-directional ground coverage at 2 kb/s. The medium gain, Ka/X band, and one low gain antenna were mounted on one side panel of the spacecraft bus, and the other low gain antenna was mounted on the opposite panel.
The spacecraft carried a suite of science and technology instruments with a total mass of 19 kg. The science instruments included a pan-chromatic camera (AMIE) for Lunar imaging, Langmuir probes mounted on booms (SPEDE) to measure the plasma environment, and radio science experiments (RSIS). Science instruments being tested as part of the technology verification were a miniaturized visible/near-infrared spectrometer (SIR) for Lunar crustal studies, a miniature X-ray spectrometer for astronomy and Lunar chemistry (D-CIXS), and an X-ray spectrometer to calibrate D-CIXS and to study the Sun (XSM). The Electric Propulsion Diagnostic package (EPDP) was a multi-sensor suite designed specifically to monitor the ion propulsion system; it also worked in concert with the SPEDE to study the space plasma environment. The RSIS was also used to monitor the ion propulsion system. An experimental telecommunication and tracking system, the Ka/X-band TTC (Telemetry and Telecommand) Experiment (KaTE) was included in the payload for technology assessment. The AMIE camera was also to be used to support a test of an image-based On-Board Autonomous Navigation (OBAN) system. OBAN was designed to minimize the amount of ground intervention required for the mission.
The SMART-1 spacecraft was launched on 27 September 2003 from Kourou, French Guiana, as an auxiliary passenger on an Ariane 5 Cyclade, which launched two other large satellites (India's Insat 3E and Eutelsat E-bird) as its primary payload. SMART-1 was put into a geostationary transfer orbit, 742 x 36,016 km, inclined 7 degrees with respect to the equator. The spacecraft used its ion drive over a period of 14 months to elongate its Earth orbit, utilizing three Lunar resonance maneuvers in August, September, and October 2004 to minimize propellant use. Its final continuous thrust maneuver took place over 100 hours from 10 to 14 October 2004. Lunar orbit capture occurred on 13 November 2004 at a distance of 60,000 km from the Lunar surface. The ion engine began firing in orbit at 05:24 UT (12:24 AM EST) on 15 November to start a 4.5 day period of thrust to lower the orbit. The first perilune took place on 15 November at 17:48 UTC (12:48 PM EST) at an altitude of about 5000 km above the Lunar surface. The engine was then used to lower the initial 4962 x 51477 km altitude, 5 day, 9 hour period, 81 degree inclination orbit, putting SMART-1 into a 300 x 3000 km polar orbit. Lunar commissioning began in mid-January 2005, and Lunar science operations in February 2005. The mission was extended from its originally planned six month lifetime by a year. As a result, SMART-1 was able to conduct mapping of the Moon's surface and evaluating the new technologies onboard from Lunar orbit until it impacted the Moon's surface on 3 September 2006.
See also SMART-1 on Wikipedia
https://www.esa.int/SPECIALS/SMART-1/
We are going to run out of oil!
Visit SpacePowerNow.org
to help fix the problem.
SpacePowerNow.org - For Human Survival
Please help support our efforts by shopping from our sponsors.

This newsletter and its contents are Copyright © 2006-2026 by The L5 Development Group. All rights reserved. - Publication, in part or in whole, requires previous written permission. - Academic or personal-use citations must refer to http://L5Development.com as their source. Thank you for your cooperation.